WildChild is a 3lb, or beetle weight, combat robot that I built in around a month from August to early September 2019. It then competed at the 2019 Rumble In The North in Saint Albans, VT, getting 8th place out of 13, losing in the quarter-finals.
WildChild was not only built on a limited timescale but was manufactured with minimal tools, which is reflected in the design. The primary tools used were: a hacksaw for cutting plates, a drill press for holes, and a tapping screwdriver to create threads.
Design Overview-Chassis
WildChild was designed to drive with two wheels and two direct driven motors that each drive one wheel. The front edge of the bottom plate rests on the ground and skids around. The small number of wheels and direct driving motors were chosen to eliminate cost and complexity as compared to 4 wheel designs. This aspect of the design was heavily influenced by heavyweight robot Texas Twister.
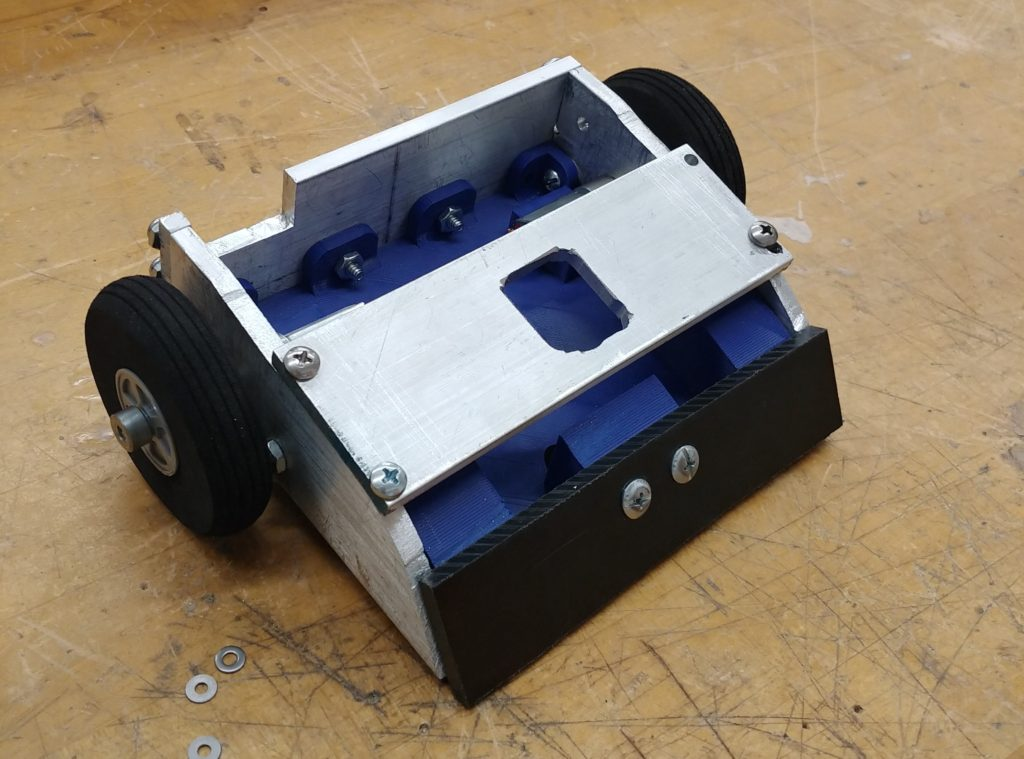
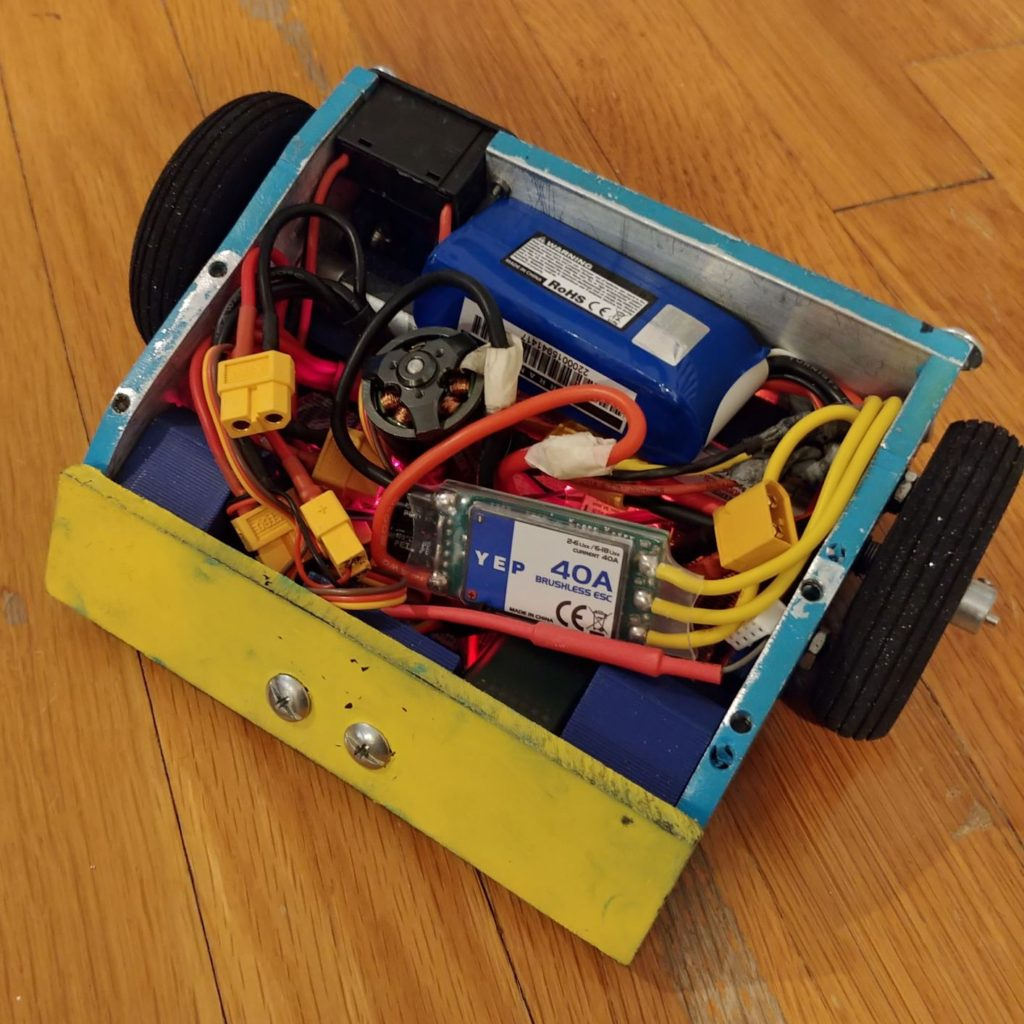
The frame of the robot was constructed with 1/4″ 6061 aluminum, 3D printed ABS, and 1/4″ UHMW(Ultra-high molecular weight) plastic. The sides and back are aluminum, with the front being UHMW. The top was initially supposed to be made from aluminum, as shown below, but it was swapped out for a UHMW plate. The aluminum was chosen for its easy machinability and relative strength, while the UHMW was chosen for its durable nature, having the ability to slow down enemy weapons and deform rather than shatter.
Within this outer frame rests the 3D printed chassis that is primarily non-structural and exists as a pan for the electronics.`
Design Overview-Weapon
The weapon system is a “flail” weapon, in which 3 weights on chains would be rotated around in a horizontal plane above the robot at high speeds. This concept had seldom been tried or documented from what I could tell, which was part of the appeal of choosing it.
| Pros | Cons |
| Don’t get the “kickback” associated with traditional spinners. | Can only hit with as much KE as there is in 1 flail. |
| Never been tried before. | Never been tried before. |
| Can put lots of mass far away from the axis of rotation. |
Before building the weapon, I did a mockup test with a wooden prototype. This test showed me that the idea could be viable, as the prototype’s rotation was fairly stable. It also showed that I would not need to worry too much about flails tangling or running into each other, which had been a concern up to that point
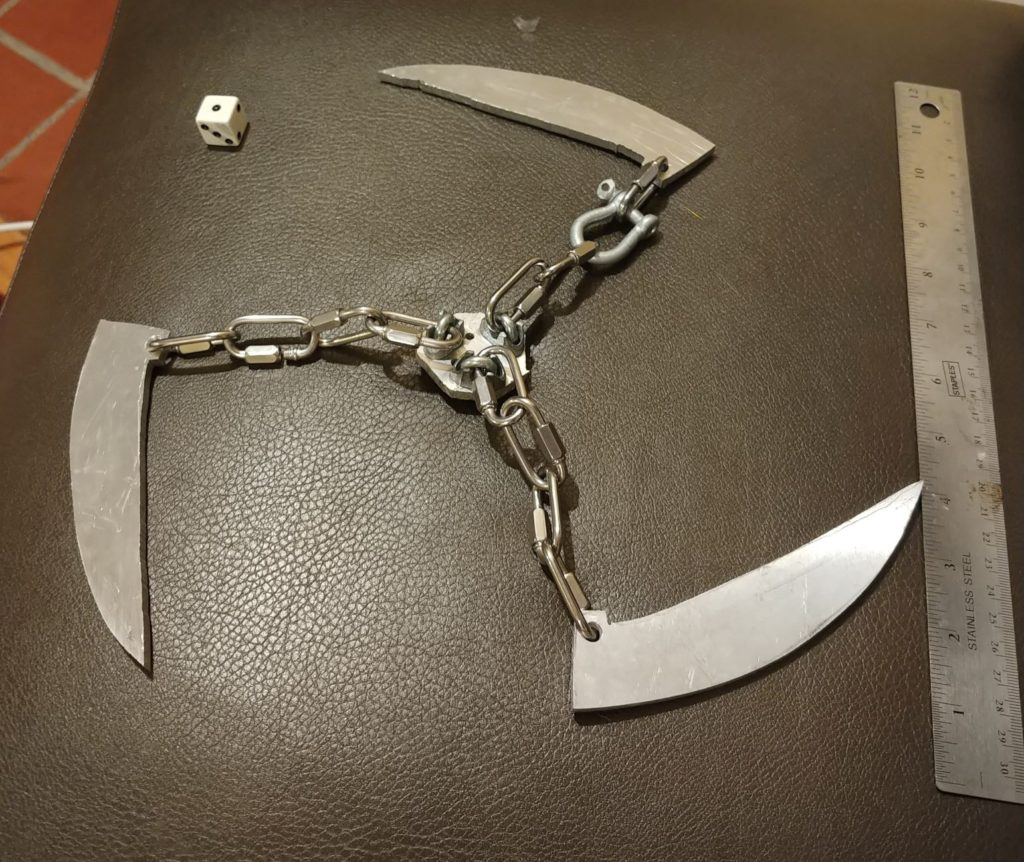
I decided on 3 for the number flails because the finite amount of weight left in the robot for the weapon meant that the number of flails would control how heavy each flail could be. I also wanted to avoid flails getting tangled and felt like 3 would space them out enough. The “icicle” or “scythe” shape was chosen for aerodynamics, and the size was about all we could do while staying under the weight limit.
In total, the weapon weighs around 0.7 pounds, which includes the weight of the flails, the links, and the center plate. Using 3 chain links per flail gave us a weapon radius of ~12″ compared to the body of the robot, which is 6″ by 6″
The final weapon was never mounted due to time constraints however in it’s finished state, it looked like this:
Performance
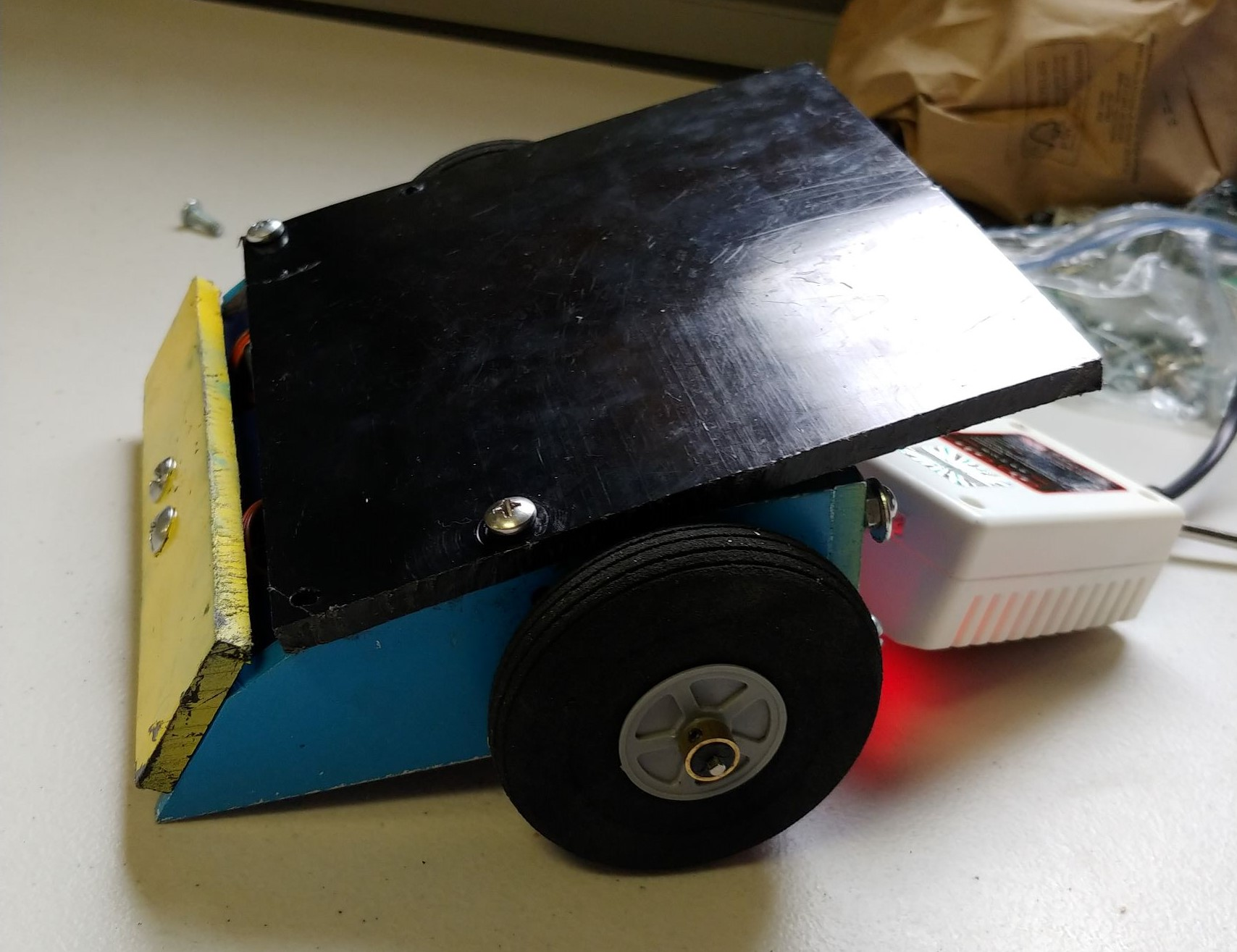
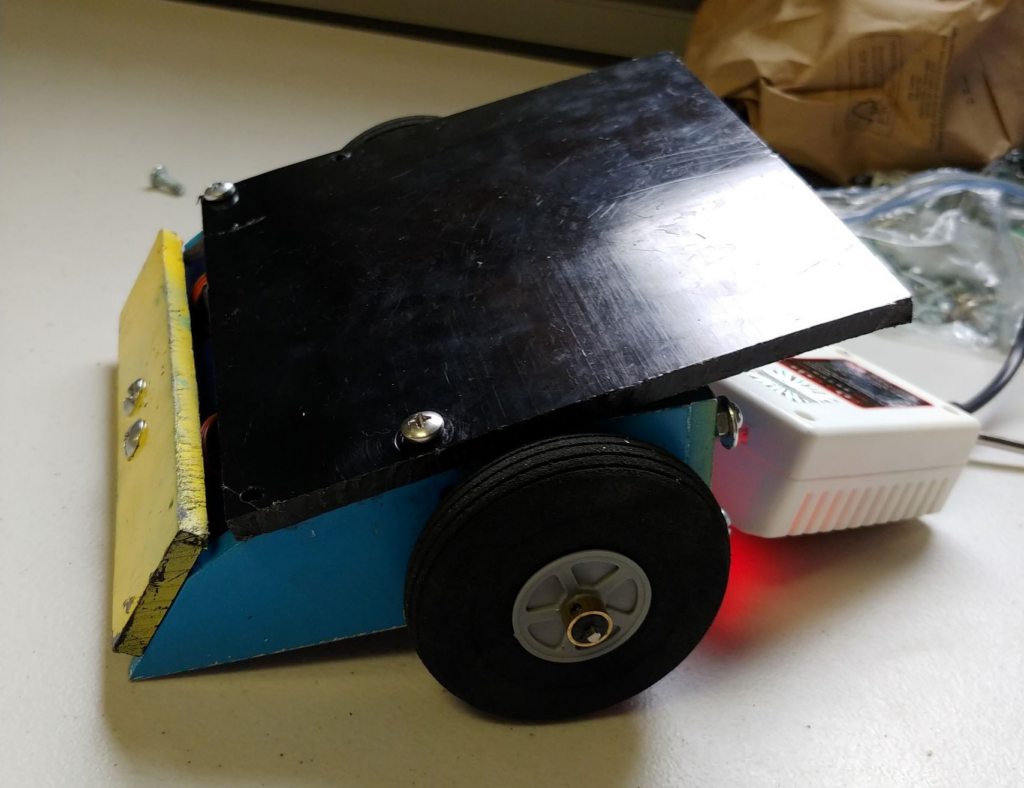
WildChild performed decently for being my first foray into combat robotics. It went 1-5 overall with its one victory coming when the opposing robot beached itself on the center divider. Without a weapon, it was hard to win matches, but WildChild held together well and stayed competitive in most fights.
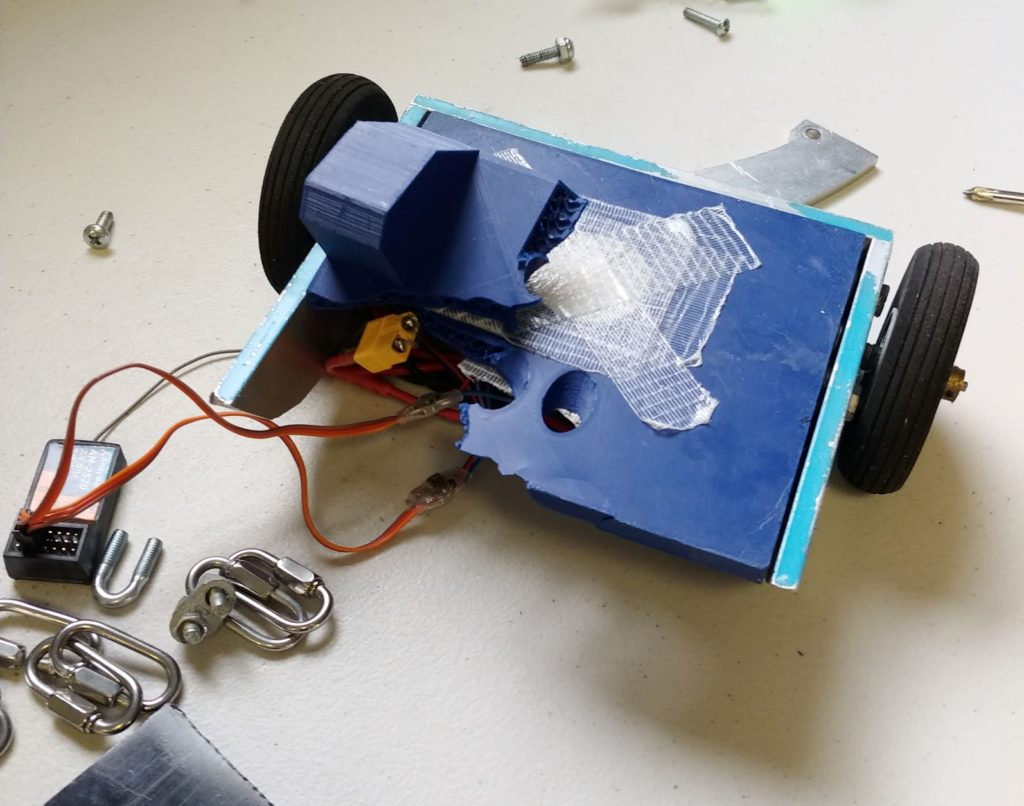
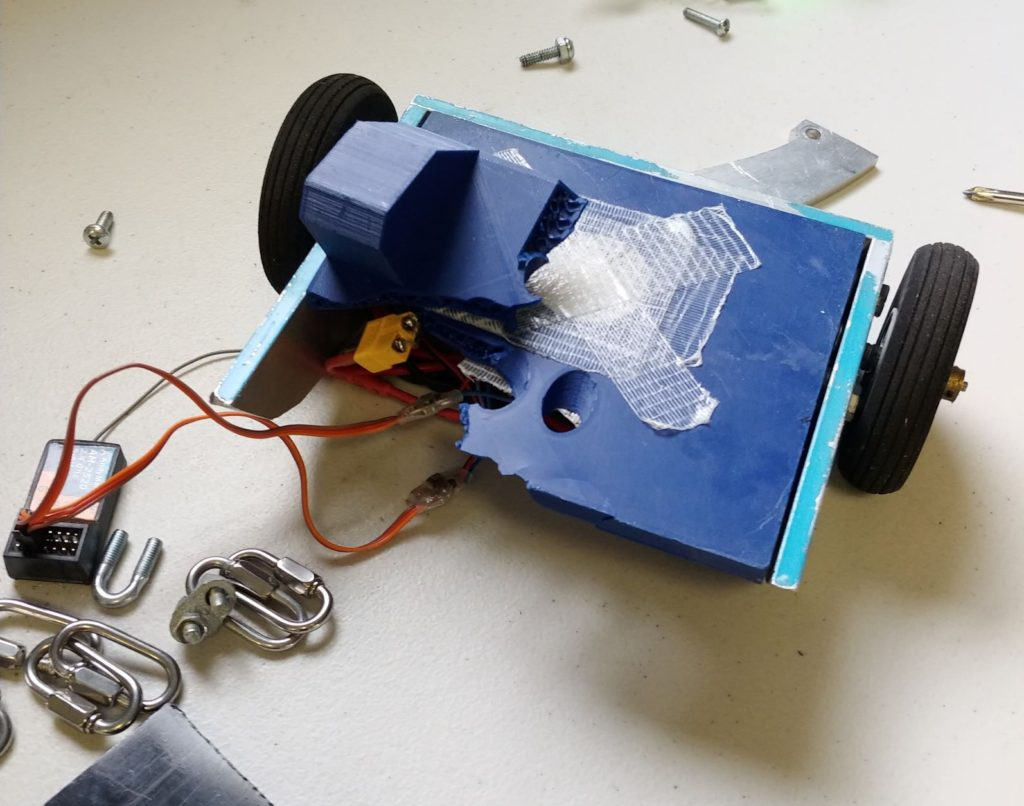
WilChild suffered 1 major failure, thankfully in its last match. It was up against the drum spinner Eager Beaver, who exploded WildChild in an awesomely violent fashion. The picture above is the aftermath of that fight. In fact, the robot was holding up well and resisting attacks from the drum spinner in the first portion of the fight. However, a few fatal design choices caused a hit from a certain angle to cause total failure of the 3d printed frame, and with its front open, the electronics spilled out and the fight was over. You can see this fight below.
Failure
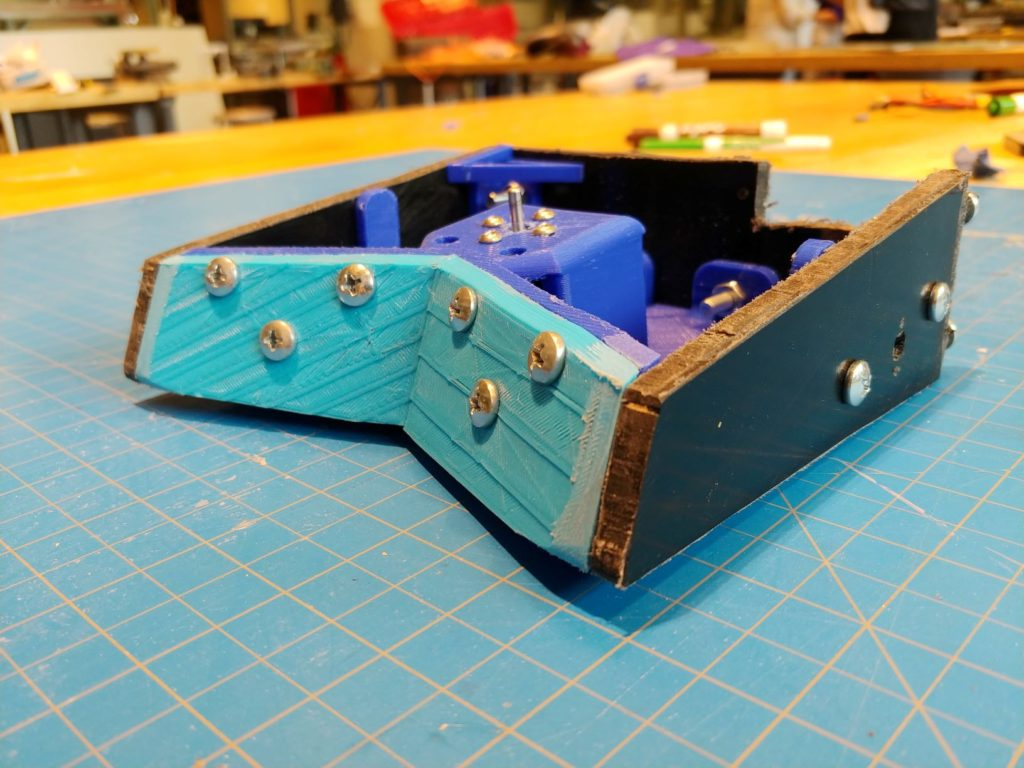
The failure came down to a fatal design flaw in the way the front plate was attached to the chassis and side plates. More specifically, the only way that the front plates were attached was to the chassis by the two bolts circled in yellow.
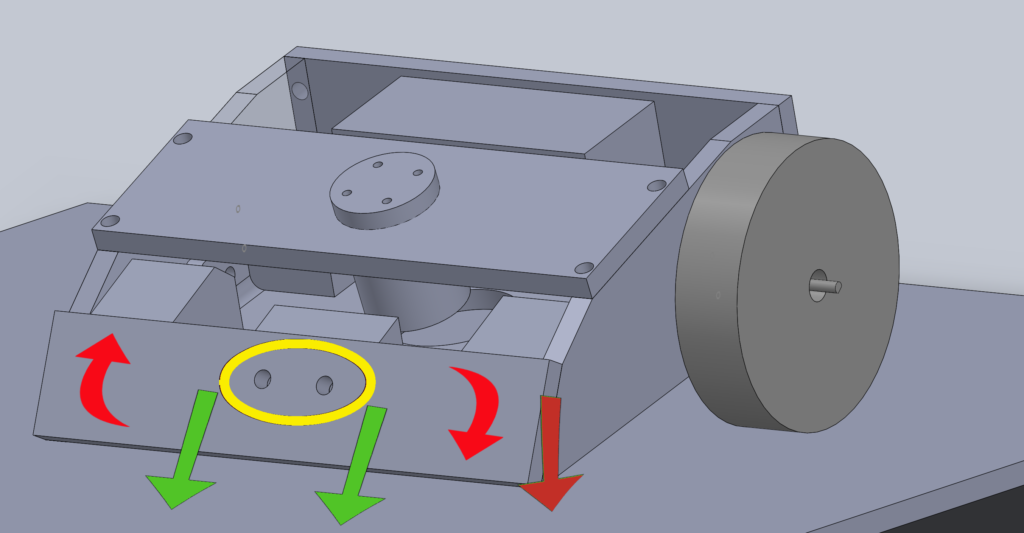
When WildChild took direct frontal hits from the drum spinner(shown in green) the front plate suffered only incidental damage. However, when Wildchild was hit diagonally at its corner(shown in red), it induced a large moment around the bolts, which caused the 3d printed chassis to snap. The damage is shown below with the robot on its back and the front facing the viewer.
In order to solve this issue, two main changes could have been made. First and most importantly, more bolt holes could have been added on the edges of the front plate through into the side plate. Secondly, the front plate could be hidden by making it smaller and making the side plates bigger, “tucking in” the front plates and preventing a direct hit to them. Doing this exposes the side plates to a similar issue, however as the side plates directly contact the ground, there is much less potential for damage.
Shown below is a sneak peek of Wildchild V2 that shows fixes to the issue that caused the failure. Now, the front plate is split into two pieces, with each piece being attached by 3 bolts.